


Pesquisadores da ETH Zurich e do Instituto Max Planck estão desenvolvendo uma perna robótica movida por músculos artificiais. Diferente dos robôs tradicionais, que dependem de motores elétricos, essa nova tecnologia utiliza atuadores eletro-hidráulicos para gerar movimentos mais naturais e eficientes, imitando o funcionamento muscular dos seres vivos.
A introdução desses músculos artificiais possibilita que os robôs realizem movimentos complexos, como saltar e caminhar por terrenos irregulares, algo que antes era difícil com motores elétricos. Os pesquisadores destacam que essa tecnologia pode, no futuro, ser aplicada em robôs quadrúpedes e humanoides, com potencial para atuar em operações de resgate e outras situações desafiadoras.
Como funciona a perna robótica?
Basicamente, a perna robótica funciona imitando o sistema muscular de animais. Além disso, em vez de usar motores elétricos convencionais, ele utiliza atuadores eletro-hidráulicos, que são responsáveis pelos movimentos. De maneira simplificada, o equipamento funciona com os seguinte princípios:
- Músculos artificiais (atuadores eletro-hidráulicos): Os músculos artificiais são sacos plásticos preenchidos com óleo. Eles são cobertos por eletrodos condutores, que, quando recebem uma carga elétrica, fazem com que os eletrodos se atraiam devido à eletricidade estática.
- Contração e extensão: Quando uma voltagem é aplicada aos eletrodos, eles se aproximam, comprimindo o óleo dentro do saco. Esse processo faz com que o atuador se contraia, encurtando o “músculo”. Quando a voltagem é removida, o atuador volta ao seu tamanho original, imitando a forma como um músculo real se contrai e relaxa.
- Controle de movimento: Para controlar os movimentos, o robô utiliza um sistema de código de computador que regula quais atuadores vão se contrair ou relaxar, criando movimentos coordenados, como dobrar e estender a perna. Isso é semelhante à maneira como os músculos dos animais trabalham em pares: quando um músculo se contrai, o outro se alonga.
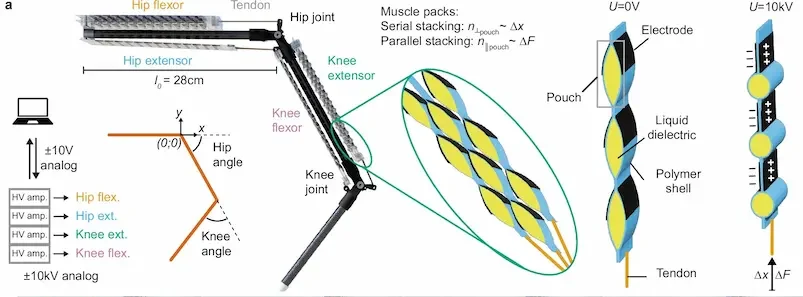
Esquemático da perna robótica (fonte: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / Max Planck Institute for Intelligent Systems)
Adaptação a diferentes terrenos e flexibilidade
A capacidade de adaptação da perna robótica é um dos seus maiores diferenciais, segundo seus pesquisadores. O sistema musculo-esqueletal foi projetado para ser elástico, o que permite que o robô se ajuste com facilidade a superfícies variadas.
Assim como ocorre com os seres humanos, que dobram os joelhos para caminhar em terrenos irregulares, a perna robótica pode se adaptar de forma similar. E essa flexibilidade é essencial em ambientes complexos, como operações de resgate em escombros ou terrenos acidentados.
Aqui, diferente dos robôs que usam sensores para detectar o terreno e ajustar suas posições, a perna robótica com músculos artificiais se adapta de maneira autônoma, baseada na interação direta com o ambiente.
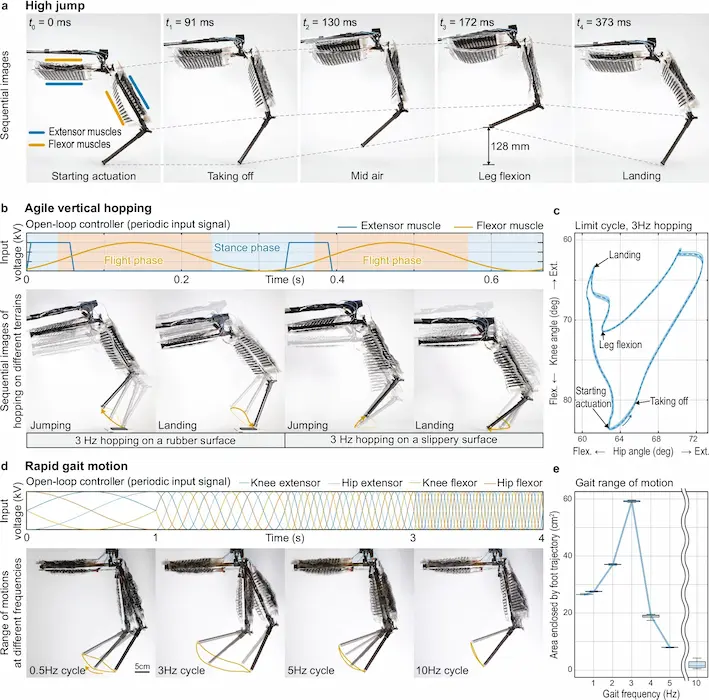
Testes de movimentação da perna robótica (fonte: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / Max Planck Institute for Intelligent Systems)
Eficiência energética do protótipo
Além de sua mobilidade avançada, a perna robótica também concilia eficiência energética. Isso porque, enquanto motores elétricos consomem muita energia para manter posições estáticas, os músculos artificiais conseguem realizar essa tarefa com menos gasto.
Para avaliar esse aspecto, os pesquisadores observaram imagens infravermelhas para quantificar quanta energia é desnecessariamente convertida em calor na perna. Então constatou-se que a perna robótica motorizada gerou mais calor para manter a posição dobrada, ao passo que a temperatura da perna robótica eletro-hidráulica manteve uma temperatura constante.
Assim, além de apresentar menor perda por calor, e perna desenvolvida pelos cientistas da ETH Zurich e do Instituto Max Planck não necessita de sistemas adicionais de dissipação de calor. Com isso, a economia energética é ainda maior.
Limitações atuais da perna robótica
Apesar das vantagens, a perna robótica ainda enfrenta desafios. A capacidade de salto, por exemplo, ainda tem limitações que os pesquisadores buscam superar em versões futuras.
“Comparado a robôs andantes com motores elétricos, nosso sistema ainda é limitado. A perna está atualmente presa a uma haste, pula em círculos e ainda não consegue se mover livremente“, afirmou Robert Katzschmann, um dos líderes do projeto.
No entanto, a expectativa é que trabalhos futuros consigam superar essas limitações, e possibilitem o desenvolvimento de robôs andantes completos utilizando a tecnologia de músculos artificiais.
O estudo completo que trata do desenvolvimento da perna robótica foi publicado na revista Nature Communications.
Referência:
Buchner, T.J.K., Fukushima, T., Kazemipour, A. et al. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nat Commun 15, 7634 (2024). https://doi.org/10.1038/s41467-024-51568-3
-

Escrito por:
Caio Póvoa










0 comentários